






-
Перелік статей написаних НПП разом зі студентами
Відео презентації студентів
-
Наукові напрямки роботи дизайн-Центра кафедри КЕОА факультету електроніки НТУУ „КПІ” (на базі лабораторії цифрових технологій)
1. Розробка та створення систем керування й моніторингу для різних прикладних завдань:
- обробка сигналів датчиків різних фізичних величин, створення керуючих впливів на виконавчі механізми за заданим законом керування;
- системи первинної обробки інформації: узгодження із джерелом аналогового сигналу, фільтрація, вимірювання і передача даних на обробку по одному із стандартних інтерфейсів.
2. Розробка та створення систем для перетворювальної та силової електроніки:
- підсилювачі потужності;
- джерела живлення.
3. Розробка та створення систем керування низьковольтним освітленням (світлове оформлення). Системи виводу інформації. 4. Розробка та створення систем керування малопотужними електроприводами:
- для безколекторних 3-х фазних двигунів;
- для шагових двигунів.
5. Розробка та створення систем для різного спектра завдань із застосуванням методів цифрової обробки сигналів:
- на базі сигнального процесора TMS320C55x для обробки аудіосигналів;
- створення програмних модулів для мікросхем програмованої логіки ALTERA, XILINX;
- реалізація різних алгоритмів обробки інформації на базі ПЛИС та DSP по ТЗ Замовника.
6. Розробка та створення систем розподіленої обробки сигналів з датчиків на базі бездротової технології ZigBee на базі RF CC24 хх Сhipcon-Texas Instruments. 7. Робота в області систем обробки відеозображення. 8. Розробка та підтримка WEB-модулів:
- створення WEB-проектів різної складності з використанням мов програмування PHP, JavaScript, DHTML, XML, XSLT.
- розробка БД MySQL;
- підтримка існуючих WEB-сайтів та модулів;
- підключення існуючих сайтів до розробленого CMS - сучасної системі керування контентом (сайтом).
9. Розробка математичних моделей та алгоритмів креативних методів вирішення складних інженерних завдань на основі:
- нейромережових технологій;
- нечітких систем;
- еволюційних алгоритмів;
- комбінованих підходів.
Проекти по зазначеним вище напрямках припускають виконання повного циклу НИОКР (від постановки завдання до розробки комплекту КД із наступним технічним супроводженням).
Науково-дослідна робота «Розробка портативного педіатричного аудіометра» (д/б №2028-п). Строки виконання: січень 2007р. – грудень 2008р. Керівник – д.т.н., проф. Лисенко О.М. Об'єкт розроблення – портативний педіатричний аудіометр для суб'єктивного слухового скринінгу новонароджених. Мета роботи – розроблення схемотехнічних та алгоритмічних рішень побудови і створення портативного педіатричного аудіометричного засобу, що реалізує метод тональної порогової аудіометрії в умовах вільного звукового поля. Методи розроблення - акустичних вимірювань, комп'ютерного моделювання, метрології та експериментальних досліджень. На основі відомих по результатам патентного та інформаційного пошуків технічних рішень побудови педіатричних аудіометрів обґрунтовано вибір методу та розроблено структуру тракту відтворювання звукового тиску портативного засобу. Проведено моделювання розроблених схемотехнічних рішень побудови аудіометричного каналу, що дозволило визначити вихідні параметри розробки та обґрунтувати вибір застосованої елементної бази. Розроблено алгоритм керування процедурою відтворювання звукового тиску заданих рівня інтенсивності та спектрального складу, який покладено в основу створеного програмного забезпечення звукореактотестера. Проведено конструкторсько-технологічний розрахунок розробки, що дозволило створити макет приладу на основі SMD-монтажу і друкованої плати 5 класу точності, який реалізує вибраний метод та синтезовану структуру аудіометричного каналу. Розроблено і експериментально апробовано метрологічне методичне та апаратурне забезпечення педіатричних аудіометрів, яке є основою для проведення подальших робіт по вдосконаленню в Україні системи метрологічного забезпечення в області аудіометрії в умовах вільного звукового поля. Результати роботи впроваджено в навчальний процес при викладанні нового курсу “Електронно-обчислювальні засоби на основі цифрових сигнальних процесорів” та дисциплін „Електронно-обчислювальні пристрої та системи”, „Цифрова електроніка та мікропроцесори” для студентів факультету електроніки та приладобудівного факультету НТУУ „КПІ”, при підготовці дисертаційної та дипломних робіт, а також наукової монографії. Отримані результати роботи планується впровадити в ВАТ „Счетмашприлад” (м. Лубни Полтавської обл.), а також заклади охорони здоров'я України (родильні дома, дитячі садки та сурдологічні центри тощо). НДР виконувалась з використанням результатів попередніх досліджень, що проводяться кафедрою конструювання електронно-обчислювальної апаратури та НДІ прикладної електроніки НТУУ „КПІ” по створенню вітчизняних засобів діагностування порушень слуху різної етіології. Галузь застосування - медицина. СЛУХ, ВУХО, ПЕДІАТРИЧНИЙ АУДІОМЕТР, ДІАГНОСТУВАННЯ, ЗВУКОРЕАКТОТЕСТЕР, МОДЕЛЮВАННЯ, СКРИНІНГ, НОВОНАРОДЖЕНІ Науково-дослідна робота «Розробка технології ехоскринінгу новонароджених для діагностування захворювань органа слуху» (д/б № 2279-п). Строки виконання: січень 2009р. – грудень 2010р. Керівник – д.т.н., проф. Лисенко О.М.
-
З темами бакалаврських робіт ви можете ознайомитись за посиланням - Бібліотека ela.kpi.ua
ТЕМИ БАКАЛАВРСЬКИХ РОБІТ
кафедри КЕОА ФЕЛ№
№
п/п
Прізвище, ім ' я та по-батькові Тема дипломного проекту
Керівник 1. Шліхта Олександр Романович Регулятор обертів для безколекторних електродвигунів доц. Кучернюк П. В. 2. Сільчук Віталій Іванович Пристрій відображення поточного часу з додатковими функціями асистент кафедри КЕОА, к.т.н. Іваннік Г. В. 3. Сидорчук Максим Миколайович Генератор ШІМ сигналу з регульованою скважністю
на основі мікроконтролерадоцент, к.т.н. Лебедев Д.Ю. 4. Романенко Святослав Володимирович Інтерактивний пристрій для введення інформації
на базі мікроконтролераст. викладач Лисенко О.І. 5. Латишев Ян-Віктор Григорович Багатофункціональний годинник зворотної дії з режимом детонації
на основі мікроконтролераст. викладач Лисенко О.І. 6. Кудлай Станіслав Васильович Прискорювач матричних операцій професор д.ф.-м. н. І. В. Редько 7. Коваленко Олександр Сергійович Парктронік з керуванням через смартфон доц., к. т. н. Кучернюк П.В. 8. Єсич Дмитро В’ячеславович Пристрій для моніторингу стану персонального комп’ютера доц., к. т. н. Кучернюк П.В. №№ п/п
Прізвище, ім ' я та по-батькові
Тема дипломного проекту
Керівник
ДК-51
1.
Антіпов Роман Олександрович Система відслідковування людей на відеопослідовності ст.викл. Дзюба В.Г. 2.
Бреус Сергій Миколайович Інтелектуальний робот, що рухається по лінії ас. Іщенко А.В. 3.
Городецький Ігор Сергійович Електронний помічник для осіб з обмеженними фізичними можливостями ас. Іщенко А.В. 4.
Гузенко Олексій Олександрович Блок нелінійного квантування оцифрованної мови ст.викл. Бондаренко Н.О. 5.
Гуменюк Валентин Віталійович Домашня метеостанція доц. Корнєв В.П. 6.
Дашкель Олег Сильвестрович Система розпізнавання штрихового коду ст.викл. Дзюба В.Г. 7.
Дейнека Дмитро Іванович Годинник реального часу на MSP 430 FG 4618 ст.викл. Мережаний П.Г. 8.
Каменькович Сергій Юрійович Багатофункціональний вимірювач з програмним керуванням доц. Лєскін В.Ф. 9.
Кокоша Юрій Володимирович Пакет програм частотного аналізу з редукцією вхідних данних доц. Тєрьошин М.О. 10.
Кошик Олег Олегович Блок обробки сигналів за допомо гою швидкого перетворення Хаара доц. Корнєв В.П. 11.
Майструк Дмитро Вікторович Блок обробки сигналів за допомогою швидкого перетворення Уолта ст.викл. Бондаренко Н.О. 12.
Михайленко Олександр Васильович Пакет програм статичного аналізу електронних схем на МДП-транзисторах доц. Тєрьошин М.О. 13.
Мотінова Ольга Анатоліївна Система віддаленого апаратного перезавантаження комутаторів та xDSL модемів ас. Собченко В.В. 14.
Осипенко Богдан Андрійович Панель оператора системи розпізнавання автомобільних номерів в середовищі LabVIEW доц. Яганов П.О. 15.
Петроє Іван Костянтинович USB носій інформації з шифрованням данних ст.викл. Дзюба В.Г. 16.
Соловйов Олександр Віталійович Спектральний аналіз оцифрованної мови в системі зв ' язку доц. Бондаренко В.М. 17.
Сорока Андрій Ігорович Пристрій для сполучення інтерфейсів COM , LPT з USB ас. Іщенко А.В. 18.
Соценко Дмитро Андрійович Розробка пакета програм статич-ного аналізу електронних схем на біполярних транзисторах доц. Тєрьошин М.О. 19.
Харченко Тарас Вікторович Перетворення текстової інформації в мову в системі зв ' язку ст.викл. Бондаренко Н.О. ДК-52
20. Архипов Ілля Миколайович Нормалізатор сигналів доц. Яганов П.О. 21. Богатчук Ігор Андрійович Портативний USB -осцилограф ас. Собченко В.В. 22. Бондарчук Володимир Валентинович RFID -замок ас. Собченко В.В. 23. Квасов Олександр Олександрович Ультразвуковий вимірювач відстані доц. Бондаренко В.М. 24. Кононенко Віра Миколаївна Блок автоматичного керування газовим пальником ас. Собченко В.В. 25. Павленко Денис Олександрович Синтезатор частоти для КВ-трансівера доц. Бондаренко В.М. 26. Погорілий Олександр Михайлович Система обробки зображень в середовищі LabVIEW ст.викл. Дзюба В.Г. 27. Рихальський Артем Юрійович Програмний пакет для аналізу лінейних схем в часовій області доц. Тєрьошин М.О. 28. Русавський Олександр Андрійович Цифровий термометр на MSP 430 FG 4618 ст.викл. Мережаний П.Г. 29. Скибенко Сергій Миколайович Пристрій керування охолодженням ПК доц. Корнєв В.П. 30. Собченко Леся Зіновіївна Комп'ютерний термометр доц. Лєскін В.Ф. 31. Солошенко Володимир Володимирович Програмний пакет частотного аналізу лінійних електронних схем з розрахунком чутливості доц. Тєрьошин М.О. 32. Титаренко Станіслав Павлович Система керування електроприводом з кроковими двигунами доц. Лєскін В.Ф. 33. Федоров Віктор Вікторович Розробка виносного буквенноцифрового індікатора доц. Лєскін В.Ф. 34. Чернявський Дмитро Віталійович GSM автомобільна сигналізація доц. Лєскін В.Ф. 35. Чуб Володимир Олександрович Програмний пакет аналізу лінійних схем в частотній області доц. Тєрьошин М.О. -
З магістерськими дисертаціями ви можете ознайомитись за посиланням - Бібліотека ela.kpi.ua№№ п/п
ПІБТема
Керівник
1
2
3
4
1.

Бондарєв Сергій ВолодимировичРеалізація алгоритмів обробки відеосигналу з використанням “ системи на кристалі ”
проф.Лисенко О.М. 2.
Дзюбецька Маргарита Олегівна Інтелектуальна система збору та обобки даних доц. Яганов П.О. 3.
Кондрашкін Дмитро Дмитрович Інтелектуальні агенти-планувальники у мультиагентних системах проф. Рогоза В.С. 4.

Короткий Євген ВасильовичНечіткі алгоритми керування безколекторним двигуном постійного струму
проф. Калніболотський Ю.М. 5.
Кузіна Анастасія Володимирівна Підсистема семантичного аналізу
ст.викл. Дідковська М.В. 6.
Лебедєв Кирило АнатолійовичАвтоматизація аналізу окремих параметрів крові
проф. Калніболотський Ю.М. 7.
Левчук Юрій Анатолійович Комп'ютерна система пошуку ліній дорожної розмітки ст.викл. Дзюба В.Г. 8.
Морськой Андрій Володимирович Якість обслуговування в мультисервісних інформаційних мережах доц. Кучернюк П.В. 9.
Новіков Олександр Геннадійович Комп'ютерна система розпізнавання дорожніх знаків ст.викл. Дзюба В.Г. 10.

Паламарчук Олександр МиколайовичРеалізація аудіологічних процедур на основі DSP -технологій
проф. Лисенко О.М. 11.

Петруненко Сергій МиколайовичВимірювальна система на основі DSP -мікроконтролера TMS320F812
проф. Лисенко О.М. 12. Голуб Максим Сергійович Методи підвищення ефективності радіоканалу безпілотних літальних апаратів доц., к.т.н. Кучернюк П.В. 13. Горюнов Ілля Миколайович Вплив архітектури набору команд на характеристики RISC-V мікропроцесорів доц., к.т.н. Кучернюк П.В. 14. Кияниця Артем Сергійович Метод та система пульсової оксиметрії доц., к.т.н. Лебедев Д.Ю. 15. Кужильний Олег Вадимович Засоби та методики оцінки ефективності передачі відеопотоку на основі технології GigE Vision з використанням процесора загального призначення доц., к.т.н. Варфоломєєв А.Ю 16. Острянко Олександр Володимирович Метод та система верифікації процесорного ядра RISC-V з використанням генератора випадкових інструкцій RISC-DV від Google зав. каф., д.т.н., проф.Лисенко О.М. 17. Пономаренко Богдан Андрійович Методи та засоби обробки зображень з GMSL камер доц., к.т.н. Корнєв В.П. 18. Салім Максим Саламович Система керування макетом міні-залізниці в масштабі H0 зав. каф., д.т.н., проф.Лисенко О.М. 19. Сергієнко Артур Володимирович Анонімні аудіо-конференції на основі протоколу WebRTC доц., к.т.н. Бондаренко В.М. 20. Сокол Ярослав Володимирович Метод розпізнавання двомірних кодів на зображеннях доц., к.т.н. Варфоломєєв А.Ю. 21. Шашков Андрій Володимирович Вплив зовнішніх чинників на характеристики каналів передачі в мережах LoRaWAN доц., к.т.н. Кучернюк П.В. - Дослідження пристрою з точки зору LabView
Зміст 1. Огляд області застосування приладу 1.1 Природа звуку та його вимірювання 1.2 Рівень та гучність звуку 1.3 Принцип роботи людського слухового апарату 2. Розробка приладу в LabView 7.1 2.1 Дослідження пристрою з точки зору LabView 2.2 Постановка задачі 2.3 Емуляція вхідного сигналу 2.4 Формування вихідних сигналів 3. Інструкція з розробки 4. Схема, плата Висновки Література
Лабораторну роботу виконавстудент гр. ДК-41 Ходак С.В.
1. Огляд області застосування приладу
1.1 Природа звуку та його вимірювання
Звук – це коливання, що сприймаються нашими органами почуття. Звукові коливання – це коливання повітря, створювані певним предметом, що здійснює поступовий рух. При цьому змінюється густина повітря. Рух одних молекул повітря передається іншим молекулам, в результаті чого у просторі розповсюджуються зони збільшення та зменшення густини, що періодично повторюються. Вони і є звуковою хвилею. Якщо ми в певному місці встановимо прилад, що здатен реагувати на зміну густини повітря, запишемо його показання за деякий час та накреслимо графік залежності густини від часу, отримаємо криву, що близька до синусоїди. Саме такі коливання і сприймаються людським вухом, в результаті чого ми отримуємо відчуття звуку. Прилад, що реагує на зміну густини повітря, називається шумометр. А пристрій, що перетворює його дані у зручну для сприйняття людиною форму – вимірювач рівня звукових сигналів . Хоча сучасні шумометри виконують і цю функцію.
1.2 Рівень та гучність звуку
При розробці приладу, що вимірює рівень звуку, слід розуміти принцип його роботи і, відповідно, знати, що таке, власне, рівень звуку. Будь-яка звукова хвиля, що розповсюджується у просторі, здатна завдавати певний тиск на першкоди (в тому числі і на наші барабанні перепонки), що зустрічаються на її шляху. Ми суб' єктивно сприймаємо зміну тиску звукових хвиль у вигляді зміни гучності звуку. Максимальна зміна тиску у повітрі при поширенні звукових хвиль в порівнянні з тиском при відсутності хвиль називають звуковим тиском , який вимірюється у Паскалях. Але в акустиці, при оціненні інтенсивності звукових хвиль частіше застосовується інший термін – сила звуку , що дорівнює квадрату звукового тиску і вимірюється в ваттах/квадратний сантиметр (Вт/кв.см.), що значно зручніше. Для того, чтобы мы змогли почути певний звук, його сила повинна бути більше за певний рівень. Цей рівень називають порогом чутності . Аналогічно і зі звуками великої інтенсивності - ми чуємо звук тільки до певного рівня, которий называють больовим порогом. Якщо сила звуку більше цього рівня, ми відчуваємо біль у вухах
1.3 Принцип роботи людського слухового апарату
Наш слуховий апарат побудований таким чином, что лінійна зміна сили звуку (чи звукового тиску) не сприймається нами як линійна зміна гучності. Гучність звуку та його сила зв'язані між собою логорифмічною залежністю. Підвищення гучності в два рази відповідає збільшенню сили звуку в 100 раз, підвищення гучності в 3 рази відповідає збільшенню сили звуку в 1000 раз. Саме тому зміну рівня (гучності) звуку прийнятно вимірювати у логарифмічних одиницях – белах (Б). Зміну сили звука в белах розраховують за формулою: N=lg I1/I2 , де N - зміна рівня звуку, а I1 и I2 - верхня та нижня границі сили звуку. На практиці частіше застосовують децибел (дБ) - десяту частину бела, адже бел – дуже велика величина. Отже, зміна рівня в децибелах розраховується за формулою N=10 lg I1/I2 або N=20 lg P1/P2. Мінімальный перепад рівня, який здатне сприйняти наше вухо рівний одному децибелу. [ 1]
Гучність звуку, дБ Поріг чутності 0 мерехтіння наручного годинника 10 шепіт 20 звук настінного годинника 30 приглушена розмова 40 тиха вулиця 50 звичайна розмова 60 шумна вулиця 70 небезпечний для здоров' я рівень 80 пневматичний молоток 90 ковальский цех 100 гучна музика 110 больовий поріг 120 сирена 130 реактивний літак 150 смертельний рівень 180 шумова зброя 200 [2]
2. Розробка приладу в LabView 7.1
2.1 Дослідження пристрою з точки зору LabView
Як вже було зазначено, вимірювач рівня звукових сигналів не вимірює звукові коливання (цим займається шумометр), а відображає гучність звуку у зручній для користувача формі (в децибелах). Власне, шумометр – це технічний пристрій у тому сенсі, що його задачею не є якісний інтерфейс користувача. Тобто, він не перетворює сигнали, а їх вимірює. І проектування роботи шумометра в середовищі LabView здається нерентабельним. Його можна було б використовувати як датчик, який передавав би інформацію до віртуального приладу LabView. [4-7] Оскільки в даній роботі вхідні сигнали ми емулюємо, візуалізація шумометра втрачає сенс : необхідно спочатку завдавати певний сигнал, потім перетворовати його по формулі N=20 lg (P1/P2) у децибели :
 де : 1 -- генератор випадкових чисел (генерується число від 0 до 1)
де : 1 -- генератор випадкових чисел (генерується число від 0 до 1)  -- константа, максимальний/мінімальний рівень коливання повітря – приблизно 100 кПа/10Е-4 Па 2 -- множення константи і випадкового числа
-- константа, максимальний/мінімальний рівень коливання повітря – приблизно 100 кПа/10Е-4 Па 2 -- множення константи і випадкового числа  -- десятичний логарифм вхідного сигналу
-- десятичний логарифм вхідного сигналу  -- 20 lg (P1/P2)
-- 20 lg (P1/P2)  -- затримка сигналу (для його зручного спостереження)
-- затримка сигналу (для його зручного спостереження)  -- відображення сигналу (залежність амплітуди від часу)
-- відображення сигналу (залежність амплітуди від часу) 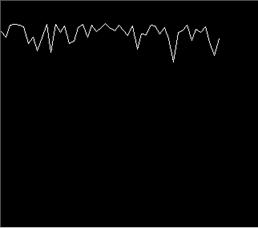 Сигнал матиме вигляд : Таке зображення, хоч і є правильним з математичної точки зору, не несе корисної інформації. Тому, в LabView пропонується розробка іншого віртуального приладу – вимірювачу рівня звукового сигналу. Як зазначалося, його основна задача – вивід на екран данних, отриманих від шумометра. Наша задача – виділення тих задач, які можуть бути легко вирішені за допомогою LabView і які можуть принести користь в реальному житті.
Сигнал матиме вигляд : Таке зображення, хоч і є правильним з математичної точки зору, не несе корисної інформації. Тому, в LabView пропонується розробка іншого віртуального приладу – вимірювачу рівня звукового сигналу. Як зазначалося, його основна задача – вивід на екран данних, отриманих від шумометра. Наша задача – виділення тих задач, які можуть бути легко вирішені за допомогою LabView і які можуть принести користь в реальному житті.2.2 Постановка задачі
Будемо вважати, що звуковий сигнал вимірюється шумометром і передається до ПК у децибелах. Цей сигнал ми емулюємо :
 При цьому максимальний рівень сигналу – 70 дБ. Далі пропонується виділити ті сигнали, що : • небезпечні для здоров' я • перевищують больовий поріг • досягають рівня смертельної небезпеки Але тоді необхідно імітувати сигнали так, щоб сигнали, небезпечні для здоров'я виникали рідше, а ті, що досчгають больового поріга і вище – ще рідше. Вважаємо, що шумометр знаходиться у виробничому цеху певного підприємства. При цьому віртуальний прилад LabView засвічує попереджувальний індикатор, якщо звуковий сигнал перевищує небезпечний рівень. Інженер (або охоронець), що спостерігає за рівнем сигналу, може призупинити виробництво або встановити захисні щити. Можна також завести статистику для визначення середньодобового рівня гучності або реєстрації небезпечних сигналів. L abView дає змогу обробити потрібний сигнал та представити його у потрібній формі. Тож зкористаймося цією нагодою !
При цьому максимальний рівень сигналу – 70 дБ. Далі пропонується виділити ті сигнали, що : • небезпечні для здоров' я • перевищують больовий поріг • досягають рівня смертельної небезпеки Але тоді необхідно імітувати сигнали так, щоб сигнали, небезпечні для здоров'я виникали рідше, а ті, що досчгають больового поріга і вище – ще рідше. Вважаємо, що шумометр знаходиться у виробничому цеху певного підприємства. При цьому віртуальний прилад LabView засвічує попереджувальний індикатор, якщо звуковий сигнал перевищує небезпечний рівень. Інженер (або охоронець), що спостерігає за рівнем сигналу, може призупинити виробництво або встановити захисні щити. Можна також завести статистику для визначення середньодобового рівня гучності або реєстрації небезпечних сигналів. L abView дає змогу обробити потрібний сигнал та представити його у потрібній формі. Тож зкористаймося цією нагодою !2.3 Емуляція вхідного сигналу
Основний сигнал подається за допомогою генератора випадкових величин і константи 70 – на виході матимемо змінний сигнал з амплітудою 70 дБ. Нехай, відомо, що вірогідність надходження звукового сигналу, що несе небезпеку здоров'ю – 80 %. Тоді емуляцію такого сигналу можна виконати наступним чином :
 якщо згенероване число < 0,8, то згенероване число 0..10 додається до основного сигналу. При цьому використовується новий оператор :
якщо згенероване число < 0,8, то згенероване число 0..10 додається до основного сигналу. При цьому використовується новий оператор :  У нього три входи : t – true, s, f – false. Якщо s – істенне, то на виході оператора значення true, якщо ні – false. В нашому випадку в разі неістинності опреатор повертає 0 (згенероване значення 0..10 не додається). Аналогічно додаються сигнали до 40 та до 80 дБ, що підвищують гучність основного сигналу відповідно до 120 дБ (больовий поріг) та 200 дБ (смертельний рівень). Вірогідність виникнення звукових хвиль такого рівня – 0,4 та 0,04. Не слід забувати, що вірогідність випадання 10 в першому генераторі та 40 у другому одночасно дорівнює добутку цих вірогідностей : P12 = P1*P2 = 0, 8*0,5=0,4. А налогічно P123 = 0,4*0,1 = 0,04. Задані вірогідності можеть бути зміненні у коді віртуального приладу.
У нього три входи : t – true, s, f – false. Якщо s – істенне, то на виході оператора значення true, якщо ні – false. В нашому випадку в разі неістинності опреатор повертає 0 (згенероване значення 0..10 не додається). Аналогічно додаються сигнали до 40 та до 80 дБ, що підвищують гучність основного сигналу відповідно до 120 дБ (больовий поріг) та 200 дБ (смертельний рівень). Вірогідність виникнення звукових хвиль такого рівня – 0,4 та 0,04. Не слід забувати, що вірогідність випадання 10 в першому генераторі та 40 у другому одночасно дорівнює добутку цих вірогідностей : P12 = P1*P2 = 0, 8*0,5=0,4. А налогічно P123 = 0,4*0,1 = 0,04. Задані вірогідності можеть бути зміненні у коді віртуального приладу.2.4 Формування вихідних сигналів
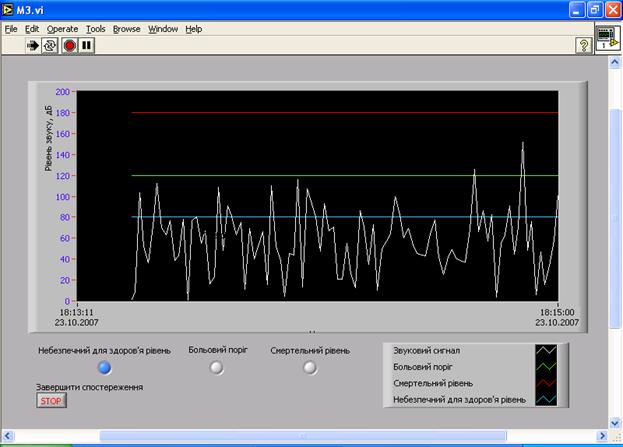
На виході маємо сгенерований основний сигнал (показання шумометра), що змінюється в часі, та постійні сигнали, що відображають рівні, небезпечні для здоров'я. Всі ці сигнали відображаємо на єдиному графіку. Для цього використовуємо функцію
 . Графік сигналу в LabView позначається символом
. Графік сигналу в LabView позначається символом  . При перевищенні основним сигналом значення, вказаною константою, засвічується попереджувальний індикатор
. При перевищенні основним сигналом значення, вказаною константою, засвічується попереджувальний індикатор  .
.Загальний код для виводу графічної інформації має вигляд :
Допоміжні функції виконують : затримку сигналу до 1000 мілісекунд (нові точки на графіку з' явля ю ться з інтервалом в одну секунду)
 та кнопка зупинки процесу
та кнопка зупинки процесу  . Створений графічний код має вигляд :
. Створений графічний код має вигляд :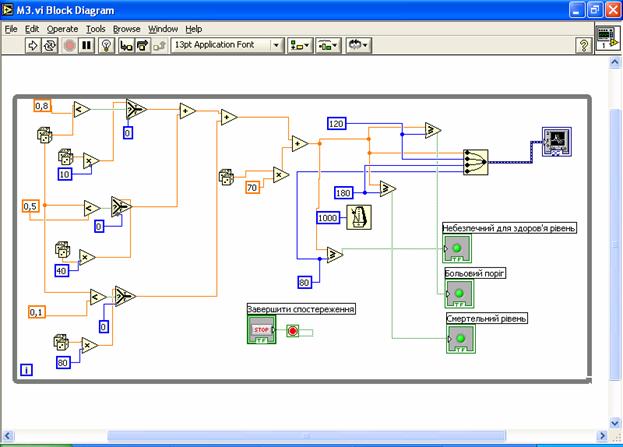
3. Інструкція з розробки ВП
В цьому розділі дається мінімальна інформація про використані методи LabView для того, щоб читач зміг самостійно повторити процес створення приладу.
1) Необхідно відкрити нове вікно для редагування коду набором комбінацій : LabView 7.1 -> New Vi ( Blank Vi ) -> С trl + E (при необхідності). Забраження на екрані матиме вигляд :
2) Розмістити у вікні наступні елементи, знаходячи їх за адресою : Window -> Show Functions Palette : • Arith/Compare - > Numeric -> Add • Arith/Compare - > Numeric -> Random Num • Arith/Compare - > Numeric -> Multiply • Arith/Compare - > Numeric -> Num Const . Числові значення вводити з клавіатури • Arith/Compare - > Comparison -> Less • Arith/Compare - > Comparison -> Select • Arith/Compare - > Comparison -> Greater or = ? і так далі. 3) З' єднати елементи, як показано на русунку. Натиснути комбінацію Сtrl+E . Передня панель створюваного віртуального приладу матиме вигляд :
Розмістити вікно, кнопку, ндикатори, написи в потрібному місці. Редагувати елементи, натискаючи Properties об'єкта (напис на панелі, що виникає при виділенні об'єкта та натисканні правої кнопки миші). 4) Для запуску віртуального приладу обрати пункти меню : Operate -> Run ( ctrl + R )
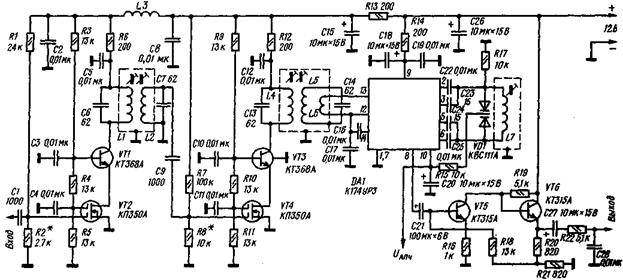
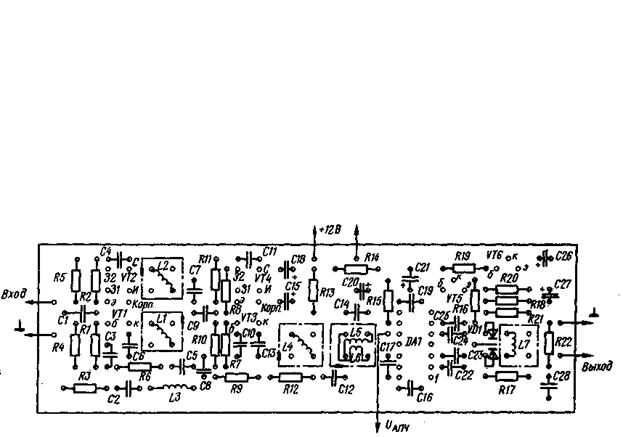
Схема електрична принципова та зборочне креслення плати вимірювача рівня звукових сигналів
Висновки
В даній роботі розроблено віртуальний прилад „ вимірювач рівня звукових сигналів” у середовищі графічного програмування LabView 7.1. Перед виконанням практичної роботи проведено дослідження принципів роботи сучаних невіртуальних аналогів з врахуванням можливостей, що надає LabView. Були визначені задачі майбутнього віртуального приладу, виконана постановка задачі та обгрунтовані типи вхідних і вихідних даних. Детально описано створення графічного коду, додані необхідні інструкції. Теоретичний матеріал супроводжується посиланнями на літературу. До звіту додається файл віртального приладу M3.vi
Список використаних джерел
- http://www.midi.ru/doc/38.htm
- http://www.everyday.com.ua/digilet/soundvolume.htm
- http://www.labview.com.ua/?q=node/2
- http://noisebuster.ru/?id=press_zva12v397
- http://www.tecon.com.ua/product20
- http://www.pribor.ru/a_ob/102.html
- http://www.octava.info/index.php?categoryid=15
З дисципліни: «Автоматизація конструкторсько-технологічного проектування»
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
«КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ»
Кафедра КЕОА
Лабораторна робота №2
з дисципліни: «Автоматизація конструкторсько-технологічного проектування»
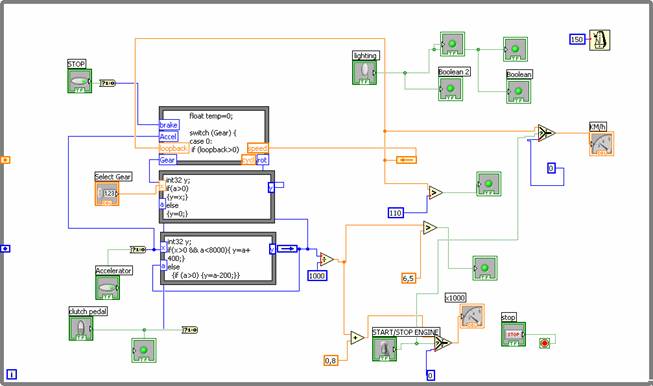
тема: « Тренажерна панель керування автомобілем »
Виконав: ст. гр. ДК-43 Тищук О. М.
Зовнішній вигляд лицьової тренажерної панелі керування автомобілем:
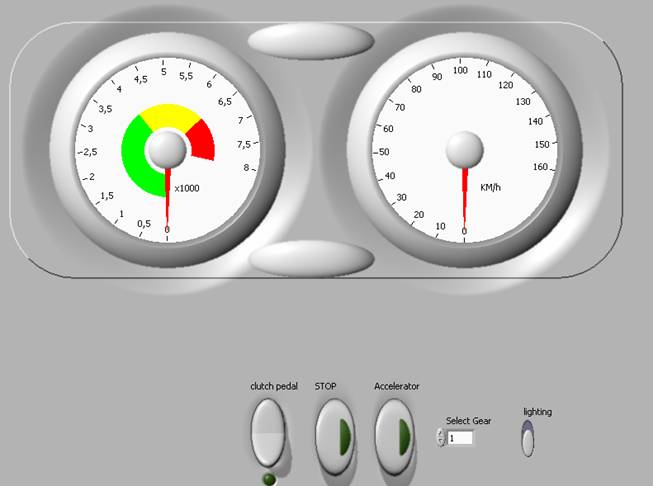
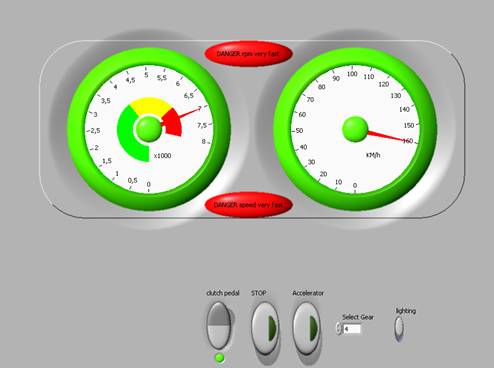
Я намагався якомога точніше змоделювати зовнішній вигляд та керування автомобілем.Старт двигуна відбувається тумблером: вгору – двигун запущений, вниз – двигун заглушений. Це можна прослідкувати на тахометрі. Також тут є спідометр, тахометр, два індикатора, які в разі небезпечної швидкості чи небезпечних, тобто високих обертів, загоряються, попереджуючи при цьому водія. Також є кнопка нічної підсвітки для темної пори. Три педалі: газ, гальма та зчеплення. І вибір передачі, на якій буде їхати автомобіль. Коли увімкнути зчеплення та розігнатися до небезпечної швидкості (високих обертах, включивши при цьому нічну підсвітку), лицьова панель приладу буде мати вигляд:
Блок-схема приладу :
Віртуальний прилад, що реалізує електронний рухомий рядок
Лабораторна робота № 2
з дисципліни: «Автоматизація конструкторсько-технологічного проектування»
тема: «Віртуальний прилад, що реалізує електронний рухомий рядок»
Виконав: ст. гр. ДК-41 Саєнко Дмитро Олегович Перевірив: Яганов П.О. Завдання: ознайомитися з середовищем графічного проектування LabView та створити в ній віртуальний прилад, який реалізує електронний рухомий рядок. Об'єкт проектування: електронний рухомий рядок
Принцип дії приладу
Рухомі рядки в повсякденному житті можна зустріти всюди: в тролейбусах та трамваях, в метро, при вході в різні приміщення та будівлі. На них розміщують різну інформацію, таку як: курс валюти, прогноз погоди, назву зупинки , різну інформацію рекламного характеру тощо . У реальних приладах є табло та пульти, за допомогою яких можна програмути ці рядки. Встановлювати різні режими, вводити сам текс, налаштовувати яскравість та контрастність дисплею, встановлювати швидкість відтворення та ін. Даний віртуальний прилад, що розробив я, теж має табло та пульт. Табло має прямокутну форму та складається з 180 світлодіодів (36 х 5) бордового кольору, щоб максимально нагадувало реальний прилад. Пульт в свою чергу має дисплей з 6 кнопками та 1 регулятор. Дисплей слугує для того, щоб демонструвати символ, який на даний момент заноситься до рядка, що буде відтворюватися. Кнопка «наступна позиція» заносить до рядка даний символ, та переводить прилад у готовність встановлення наступного. Клавіша «відтворення» завершаю фазу програмування, та починає відтворювати на табло запрограмовану інформацію. Регулятор «затримка відтворення [ ms ] » змінює швидкість «бігу» рядка. Він вказує на те, яка затримка встановлена у мілісекундах (рекомендоване значення затримки 200мс). Кнопка «Скид» обнуляє масив, та дозволяє заново, без перезавантаження прилада, заново його програмувати. Кнопка «Стоп» вимикає пристрій.
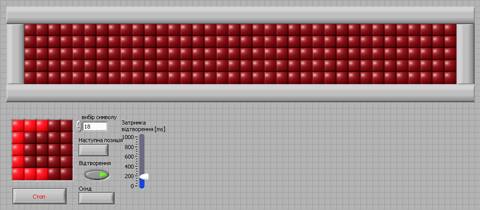
Рис.1. Передня панель віртуального приладу
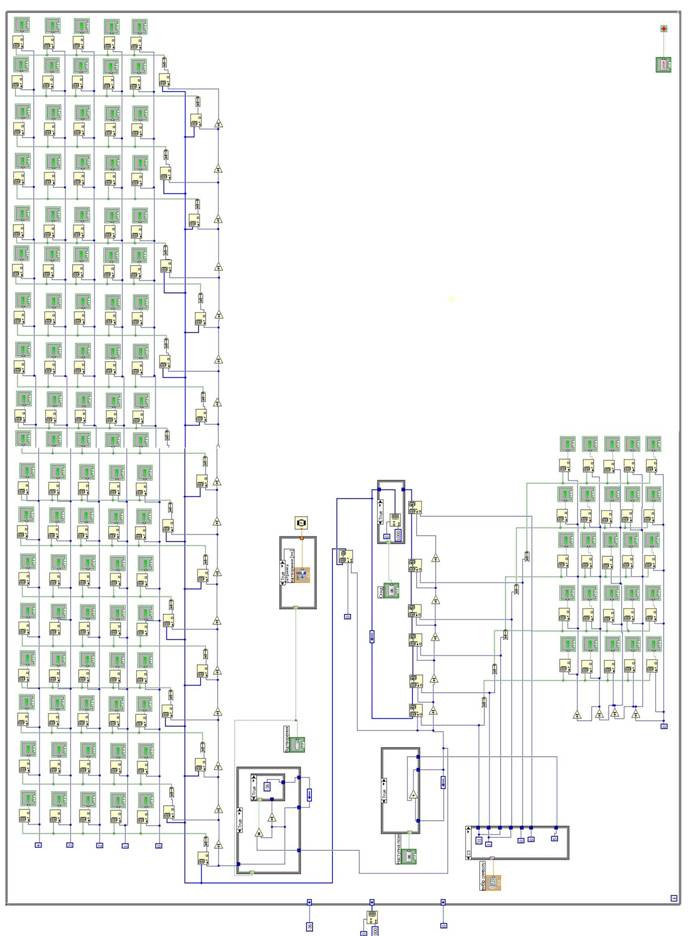
Рис 2. Графічний програмний код пристрою (блок-схема)
Даний пристрій має свою базу даних, в якій зберігаються варіанти символів, що бути поміщення на табло. Щоб відтворити на світлодіодах певну літеру, яку ми маємо у вигляді бінарної матриці, де кожний елемент буде відповідати певному діоду. Щоб діод загорівся, необхідно на нього подати «1», а щоб погасити – «0».
0
1
1
0
0
1
1
1
0
0
1
1
1
0
1
1
1
0
1
0
0
1
0
1
0
0
1
0
1
0
0
0
1
0
0
1
1
1
1
1
0
1
1
1
0
0
1
0
0
0
1
0
0
1
1
0
0
1
0
1
0
0
1
0
1
0
0
0
1
0
0
1
1
0
0
1
0
1
1
1
0
0
1
1
1
0
1
1
1
0
15
20
20
15
0
31
21
21
10
0
31
17
17
0
31
17
17
14
Таб.1. Приклад кодування елементів
Для зручності літери записують не як бінарну матрицю, а як одномірний масив з десяткових чисел. Наприклад, коду «15 20 20 15 0» буде відповідати літера „А”. Такий набір маленьких масивів зберігається в кейс-структурі, до якої на вході під ' єднаний лічильник «вибір символу». Він вказує, який саме символ ми бажаємо занести до основного масиву. Існує головний масив, до якого заносяться коди тих символів, що обрав користувач. Щоб надати можливість програмувати масиви різної довжини, ініціалізується спочатку масив на 1000 елементів, який заповнюється нулями, а потім під час фази відтворення залишкове порожнє місце видаляється. Кнопка «наступна позиція» вказує поточний індекс основного масиву, який збільшується з кожним натисканням цієї кнопки рівно на стільки, на скільки стовпчиків має символ. Наприклад, літера «А» має 5 стовпчиків, а літера «С» - 4. Зайвий нульовий рядок навмисно додається до коду символу, щоб на табло була відстань між літерами, і запрограмований текст був читабельним. Структура відтворення символів однакова, як на маленькому дисплеї, так і на великому табло. Спочатку перед кожним стовпчиком відділяється з масиву десяткове число, потім це число переводиться в бінарний масив, після чого з бінарного масиву на кожний діод надходить сигнал відповідного значення. Інкрементуючи індекс стовпчика, створюється ефект руху рядка. Кнопка «Скид» замінює головний масив, заповнений певною інформацією, пустим масивом. Висновок: Дана робота лише здається дуже заплутаною та важкою, насправді вона має дуже багато одноманітних елементів, що потребують одноманітної роботи. Такими елементами є база даних символів та система світлодіодів, що на перший погляд здається дуже важким та заплутаним. Продумуючи алгоритм, я зміг уникнути важкості в оперуванні двохвимірних масивів, поєднавши усе в одному одновимірному рядку чисел шляхом перетворення бінарних кодів, що дуже спростило задачу та зробило доступним до розуміння програмний код (блок-схему) пристрою. Додаток 1. Іконки підпрограм графічного коду
Графічне зображення Функціональність

Тумблер 
Кнопка 
Світлодіод 
Поворотна ручка зі шкалою 
Цифровий індикатор 
Визначає чи рівні елементи, передані на вхід 
Визначає чи перший елемент більше другого 
Числова константа 
Двійкова константа 
Збільшує вхідне значення сигналу на 1 
Ініціалізує масив (вказується розмірність та початкові значення) 
Змінює відповідний елемент в масиві 
Видає відповідний елемент з масиву, що поданий на вхід 
Зворотній зв'язок у циклі 
Цикл « while »  - кількість ітерацій;
- кількість ітерацій;  - критерій зупинки.
- критерій зупинки.
Структура « case »
 Summary [DOC]
Summary [DOC]